
3D-Printed Magnetic Muscles Propel Origami Robots to New Heights in Soft Robotics
Edited by: Tatyana Hurynovich
A research collective based at North Carolina State University (NC State) has recently unveiled a groundbreaking technique in advanced 3D printing, marking a major leap forward for the field of soft robotics. This innovative development, publicly announced in September 2025, centers on the creation of microscopic, ultrathin magnetic sheets that effectively function as artificial “magnetic muscles.” These films are specifically engineered for seamless integration into the complex, folded structures characteristic of origami robots. Critically, this methodology successfully addresses a long-standing constraint inherent in previous soft robotic systems: the necessary inflexibility of traditional, rigid magnetic actuators, which often compromised the structural integrity and inherent compliance of the soft surfaces they were meant to manipulate.
The foundation of this novel approach was established under the direction of Assistant Professor Xiaomeng Fang, affiliated with the Wilson College of Textiles at NC State. The core manufacturing process involves the precise co-extrusion of rubber-based polymers combined intimately with ferromagnetic particles. This specialized technique results in the production of a highly elastic and durable film. When these films are strategically applied to the critical folding points of an origami robot, they enable sophisticated, controlled movement driven entirely by external magnetic fields. This allows the robot to maintain its intrinsic pliability and soft structure. The dedicated research team collaborating on this complex project included Sen Zhang, Yuan Li, Zimeng Li, Nabil Cheddid, Peiqi Zhang, and Ke Cheng.
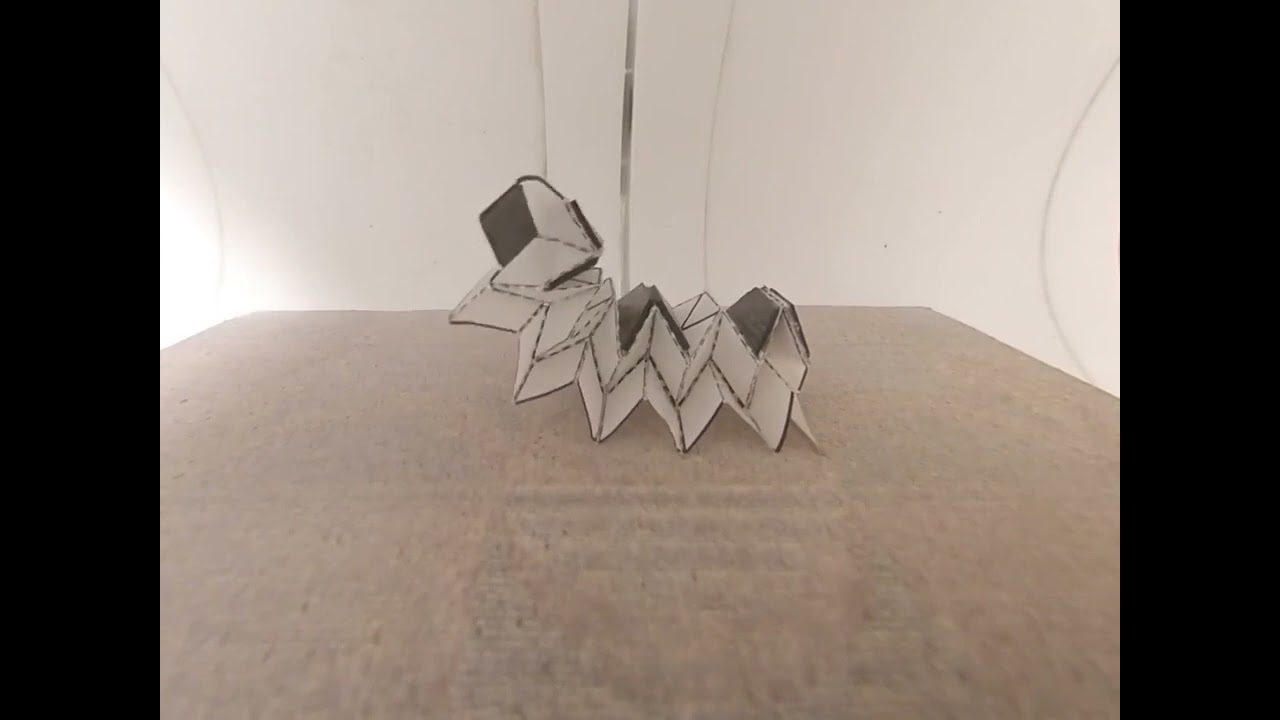
To demonstrate the practical potential of this technology, the team successfully showcased two distinct robotic models, both of which utilized the efficient, space-saving Miura-Ori folding pattern. The first prototype was meticulously engineered for potential applications in non-invasive drug delivery. During rigorous laboratory testing, which involved a simulation of the human stomach—specifically, a plastic sphere filled with warm water—the robot was precisely guided toward a simulated ulcerated lesion using focused external magnetic control. Once accurately positioned, the device, stabilized by the externally affixed soft magnetic films, was commanded to unfold, facilitating the controlled and localized release of medication. This capability represents a significant step toward developing safer and far more precise medical interventions, offering hope for targeted treatments that minimize systemic side effects.
The second compelling demonstration highlighted the robot's impressive capacity for practical locomotion, specifically a controlled crawling motion. This particular robot proved robust enough to navigate and overcome physical obstacles reaching heights of up to 7 mm. The movement was achieved by selectively activating and deactivating the external magnetic field, which caused the integrated “muscles” to contract and subsequently relax in a coordinated sequence. This demonstrated adaptability in movement underscores the wide versatility and robustness of the NC State innovation.
Xiaomeng Fang emphasized that the inherent adaptability of these magnetic muscles means they could be readily applied to an extensive range of different origami designs, promising revolutionary advancements in critical fields such as biomedicine and deep space exploration. The ability to control movement without requiring internal motors or batteries simplifies design and enhances durability. Fundamentally, this work elevates the level of precise control available for soft robotic systems, where sophisticated, complex motion is now a direct, highly responsive outcome of external, non-contact manipulation, opening up new paradigms for how machines interact with delicate environments.
27 Views
Sources
heise online
How origami robots with magnetic muscles could make medicine delivery less invasive and more effective
Read more news on this topic:



Did you find an error or inaccuracy?We will consider your comments as soon as possible.